Introduction to Bilevel Optimization
Jesús-Adolfo Mejía-de-Dios 2 min readIt is well known that, without loss of generality, an optimization problem can be defined as finding the set:
\begin{align} \label{eqn:Xargmin}X^* &= \arg \min_{\vec{x} \in X} f(\vec{x}) \\ \nonumber
&= \{ \vec{x}^* \in X \ : \ f(\vec{x}^*) \leq f( \vec{x} ), \
\end{align}
where a bounded below function $f$ , i.e., $f(x^*) > -\infty$ is called objective function. $X$ is a $D$-dimensional parameter space, usually $X \subset \mathbb{R}^D$ is the domain for $\vec{x}$ representing constraints on allowable values for $\vec{x}$.
After the above description, a general single-objective BO problem with single-objective functions at both levels can be defined as follows:
Definition (Bilevel Optimization Problem) The 5-tuple $(F, \ f, \ X, \ Y, \ \mathbb{R} )$ is called bilevel problem if the the upper-level/leader’s objective function $F: X \times Y \to \mathbb{R}$ and the lower-level/follower’s objective function $f: X \times Y \to \mathbb{R}$. Then, the optimization process is formulated as follows:
Minimize:
\begin{equation}F(\vec{x},\ \vec{y}) \text{ with } \ \vec{x} \in X , \ \vec{y} \in Y
\label{eqn:minF1}\end{equation}
subject to:
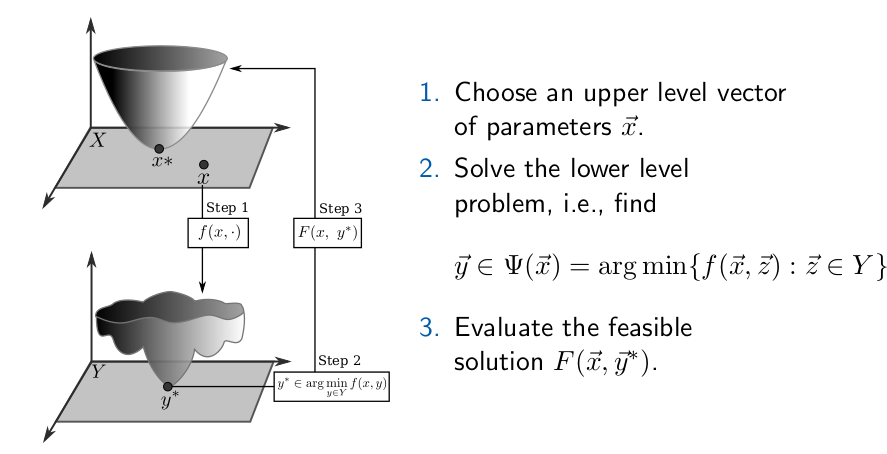
\begin{align} \label{eqn:y-arg} & \vec{y} \in \arg \min \{ f(\vec{x}, \vec{z}) \ : \vec{z} \in Y \}\\ \label{eqn:G} \end{align}Note that, for simplicity, equality constraints were not considered in the definition above.
The figure below shows a schematic procedure to evaluate a solution in bi-level optimization problems.
In 1985, Jeroslow probed that linear bilevel optimization problems are NP-hard. After that, Hansen et al. showed that some BO problems are strongly NP-hard, since evaluating a solution in a bilinear programming problem is also NP-hard.
Example
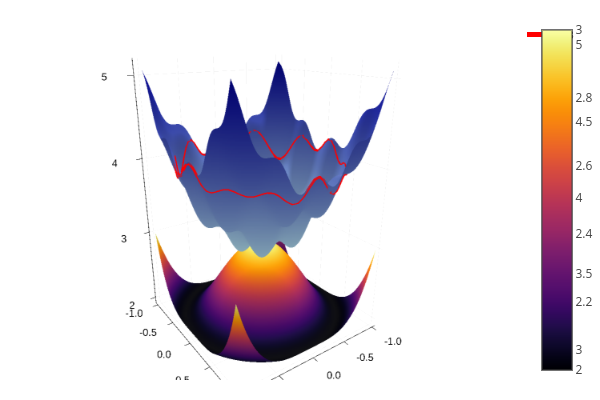
Consider the following bilevel problem:
Minimize:
$$
F(x, y) = x^2 + 0.1\cos(4\pi x) + y^2 + 0.1\sin(4\pi y)
$$
Subject to:
$$
y \in \arg \min \{ f(x, z) = (x^2 + z^2 -1)^2 \ : \ z\in Y \}
$$
Feasible Region
Th search space is defined over $X = Y = [0,1]$ and the feasible region is:
\begin{align*}
\{ (x, y)\in X \times Y \ : \ x^2+y^2 = 1 \}
&= \{ (x, \pm \sqrt{1 – x}) \ : \ x \in X \} \\
&= \{ (\cos(\theta),\ \sin(\theta)) \ : \ \theta \in [0, 2\pi) \}
\end{align*}
Post comments
Comments are closed.
It is usually the answer in linear programming. The objective of linear programming is to find the optimum solution (maximum or minimum) of an objective function under a number of linear constraints. The constraints should generate a feasible region: a region in which all the constraints are satisfied.
Like!! I blog quite often and I genuinely thank you for your information. The article has truly peaked my interest.